Автоматизация процесса нитрования
Следовательно, наш компенсатор физически реализуем.
Методика расчета компенсатора Rк, подключённого на вход регулятора.
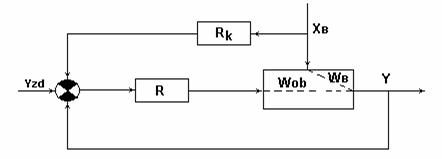
Рисунок 10 – Структурная схема комбинированной АСР
с динамическим компенсатором, подключенным на вход регулятора.
Применим к схеме, приведённой на Рисунке 10, условие инвариантности выходной величины Y по отношению к возмущающему воздействию Xв:
![]() ,
,
где WВ(P) - передаточная функция по каналу возмущения;
Rк(P) - передаточная функция компенсатора;
Wоб(P) - передаточная функция объекта.
R(P) - передаточная функция регулятора.
Произведя преобразование, получаем:
![]() (24)
(24)
Обозначим: ![]()
![]()
Тогда с учетом запаздываний в объекте по каналам возмущения и управления получим:
![]() (25)
(25)
Проверяем выражение (25) на физическую реализуемость компенсатора.
Компенсатор физически реализуем, если:
1)tк³ 0, что возможно при tв³tоб
2) mк £ nк, т.е. если порядок полинома числителя Rк(p) меньше или равен порядку полинома знаменателя.
Для комбинированной АСР с компенсатором, подключенным на вход объекта имеем:
![]()
Для комбинированной АСР с компенсатором, подключенным на вход регулятора имеем:
![]() 5.2. Исследование комбинированной АСР.
5.2. Исследование комбинированной АСР.
Для исследования комбинированной АСР с подключением динамического компенсатора на вход объекта используем проект в среде MVW - ASRK11.
- Переходные характеристики для системы без компенсатора и Xв=1 представлены на Рисунке 11.
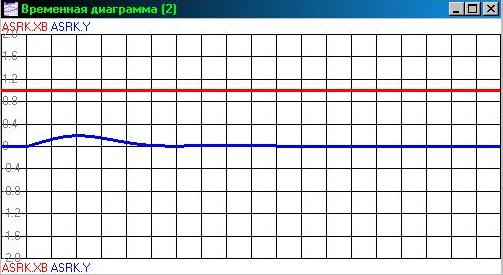
Рисунок 11 – Переходные характеристики для системы без компенсатора и Xв=1.
Показатели качества:
- Переходные характеристики для системы с компенсатором и Xв=1 представлены на Рисунке 12.
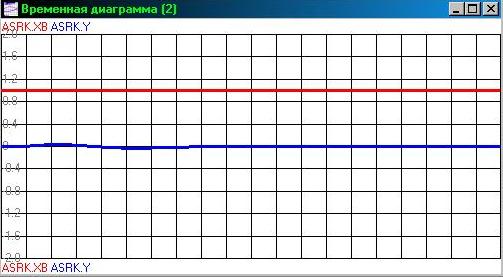
Рисунок 12 – Переходные характеристики для системы с компенсатором и Xв=1.
В этом случае отклонение выходного сигнала от заданного не превышает 3,3%.
· Переходные характеристики для системы с компенсатором и Xв=1, Yzd=1 представлены на Рисунке 13.

Рисунок 13 – Переходные характеристики для системы с компенсатором и Xв=1, Yzd=1.
· Переходные характеристики для системы с компенсатором и Xв=1, X1=1 представлены на Рисунке 14.