Кинематический и силовой расчёт механизмов лебёдки
1 Структурный анализ механизма
1.1 Определяем степень подвижности механизма по формуле Чебышева
Механизм – система тел подвижно соединённых между собой и совершающих вполне определённые целесообразные движения под действием приложенных сил, при этом, как правило, происходит преобразование движения одного или нескольких тел в требуемое движение других тел.
Количество степеней подвижности – количество независимых параметров, которых необходимо задать в механизме, для того, чтобы положение всех звеньев механизма в пространстве было однозначно определено.
Плоские кинематические цепи – цепь, у которых если одно из звеньев сделать неподвижным, то остальные звенья будут двигаться так, что траектории точек будет располагаться в параллельных плоскостях.
Кинематические цепи – соединение звеньев в кинематические пары.
Кинематические пары – соединение двух звеньев находящихся в соприкосновении и допускающие относительную подвижность.
Высшие кинематические пары – соприкосновение звеньев происходит по линии или в точке.
Низшие кинематические пары – соприкосновение звеньев происходит по поверхности ( их только семь видов).
Звенья – тела входящие в состав механизма.
W = 3n – 2pн – pв ,
где
n – количество подвижных звеньев механизма, n = 3 (1;2;3);
pн – количество низших кинематических пар, pн = 4 [О(0;1); А(1;2); В(3;0)];
pв – количество высших кинематических пар, pв = 0.
тогда
W = 3∙3 – 2∙4 – 0 = 1
1.2 Разложить механизм на группы Ассура
Группы Ассура (нормальные цепи) – простейшие цепи, степень подвижности которых равна нулю.
Сложные схемы механизмов получаются последовательным присоединением к начальному механизму ряда кинематических цепей. Для того, чтобы получаемый сложный механизм также обладал одной степенью подвижности, нужно, чтобы эти последовательные наслоения не изменяли степень подвижности начального механизма, равную единице.
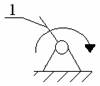 Группа Ассура I класса состоящая из стойки и звена 1
Группа Ассура I класса состоящая из стойки и звена 1
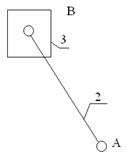 Группа Ассура II класса состоящая из звеньев 2;3
Группа Ассура II класса состоящая из звеньев 2;3
Формула строения механизма : I (0;1) → II (2;3)
2 Кинематический анализ механизма
Кинематический анализ механизма выполняется на прилагающемся первом чертёжном листе формата А1 с использованием масштабных коэффициентов и заданными числовыми значениями параметров.
Масштабный коэффициент – отношение величины в свойственных ей единицах измерений к отрезку на чертеже, который изображает эту величину.
2.1 Построение плана положения механизма и диаграмм
План положений механизма строится по заданным расстояниям от коленчатого вала до кривошипа и от кривошипа до ползуна, углом, на который отклонён кривошип.
Диаграмма перемещений ползуна строится на основании плана положений механизма. Масштабный коэффициент определяется по формуле:
![]() ,
,
где
![]() - заданное расстояние между точками О и А,
- заданное расстояние между точками О и А, ![]() ;
;
![]() - расстояние взятое произвольно,
- расстояние взятое произвольно, ![]() .
.
тогда
![]()
Диаграмма скоростей строится на основании диаграммы перемещений ползуна путём графического дифференцирования, для чего вводится произвольное расстояние ![]() , от которого откладывается угол наклона промежутка, взятого с диаграммы перемещений ползуна. На пересечении соответствующих линий отмечаются точки пересечения, совмещение которых волнистой линией даёт график скоростей. Диаграмма ускорений строится аналогичным образом, при
, от которого откладывается угол наклона промежутка, взятого с диаграммы перемещений ползуна. На пересечении соответствующих линий отмечаются точки пересечения, совмещение которых волнистой линией даёт график скоростей. Диаграмма ускорений строится аналогичным образом, при ![]() . Вертикальный масштабный коэффициент (ход ползуна) для диаграмм перемещений ползуна, скоростей и ускорений точки В определяется по формуле:
. Вертикальный масштабный коэффициент (ход ползуна) для диаграмм перемещений ползуна, скоростей и ускорений точки В определяется по формуле: